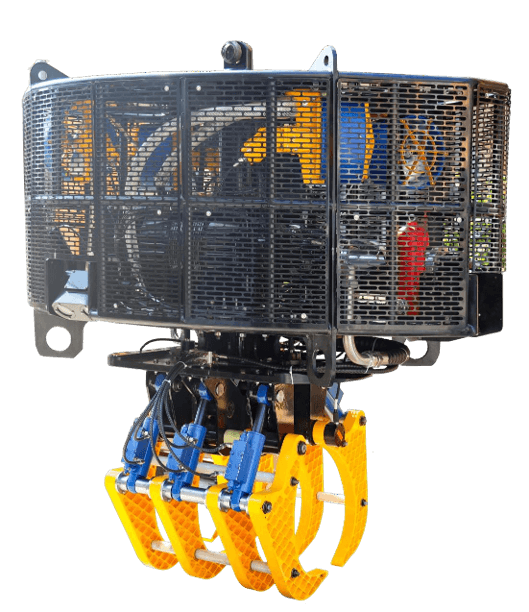
The main control part of the water surface includes a control system, power distribution system, and winch system, achieving the operation and control of underwater grippers and detection sensors, displaying and storing optical and acoustic detection data, real-time monitoring of underwater status, high-precision positioning of the water surface, and other functions. The underwater gripper is used to capture underwater targets.